Ekstrapolasi (Extrapolation) adalah proses matematis untuk memprediksi nilai yang akan datang berdasarkan keterkaitan matematis dari nilai-nilai sebelumnya.
Dalam contoh ini akan diprediksi nilai sinus 60° dari deret sinusional sin-0, 10, 20, 30, 40, 50. Pendekatan yang digunakan adalah linear dan polynomial (quadratic, cubic, quartic dan quintic), menggunakan operasi matrik. Formula matematis ini dikerjakan dengan bantuan arduino Uno.
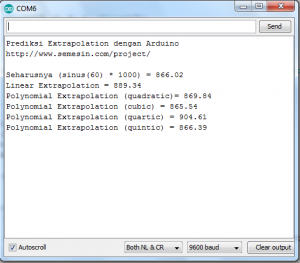
dan hasilnya adalah:
- Seharusnya (sinus(60) * 1000) = 866.02
- Linear Extrapolation = 889.34
- Polynomial Extrapolation (quadratic)= 869.84
- Polynomial Extrapolation (cubic) = 865.54
- Polynomial Extrapolation (quartic) = 904.61
- Polynomial Extrapolation (quintic) = 866.39
Berikut sketch/koding ekstra polasi arduino:
Link download library MatrixMath
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 | #include <MatrixMath.h>float dataSinus[] = {0.0, 173.64, 342.02, 500.00, 642.78, 766.06};// -- 866.02void setup() { Serial.begin(9600); Serial.println("Prediksi Extrapolation dengan Arduino"); Serial.println(); byte indexTerakhir = sizeof(dataSinus) / sizeof(float) - 1; Serial.print("Seharusnya (sinus(60) * 1000) = "); Serial.println(866.02); float prediksi; prediksi = linearExtrapolation(dataSinus[indexTerakhir], dataSinus[indexTerakhir - 1]); Serial.print("Linear Extrapolation = "); Serial.println(prediksi); prediksi = polynomialExtrapolationQuadratic(dataSinus[indexTerakhir], dataSinus[indexTerakhir - 1], dataSinus[indexTerakhir - 2]); Serial.print("Polynomial Extrapolation (quadratic)= "); Serial.println(prediksi); prediksi = polynomialExtrapolationCubic( dataSinus[indexTerakhir], dataSinus[indexTerakhir - 1], dataSinus[indexTerakhir - 2], dataSinus[indexTerakhir - 3]); Serial.print("Polynomial Extrapolation (cubic) = "); Serial.println(prediksi); prediksi = polynomialExtrapolationQuartic( dataSinus[indexTerakhir], dataSinus[indexTerakhir - 1], dataSinus[indexTerakhir - 2], dataSinus[indexTerakhir - 3], dataSinus[indexTerakhir - 4]); Serial.print("Polynomial Extrapolation (quartic) = "); Serial.println(prediksi); prediksi = polynomialExtrapolationQuintic( dataSinus[indexTerakhir], dataSinus[indexTerakhir - 1], dataSinus[indexTerakhir - 2], dataSinus[indexTerakhir - 3], dataSinus[indexTerakhir - 4], dataSinus[indexTerakhir - 5]); Serial.print("Polynomial Extrapolation (quintic) = "); Serial.println(prediksi); while (1);}void loop() {}float linearExtrapolation(float dataN, float dataNminus1){ return dataNminus1 + (2 * (dataN - dataNminus1));}float polynomialExtrapolationQuadratic(float dataN, float dataNminus1, float dataNminus2){ float A[3][3] = {{1.0, 0.0, 0.0}, {1.0, 1.0, 1.0}, {1.0, 2.0, 4.0} }; float B[3] = {dataNminus2, dataNminus1, dataN}; float C[3]; Matrix.Invert((float*)A, 3); Matrix.Multiply((float*)A, (float*)B, 3, 3, 1, (float*)C); return(C[0] + (C[1] * 3.0) + (C[2] * 9.0));}float polynomialExtrapolationCubic(float dataN, float dataNminus1, float dataNminus2, float dataNminus3){ float A[4][4] = { {1.0, 0.0, 0.0, 0.0}, {1.0, 1.0, 1.0, 1.0}, {1.0, 2.0, 4.0, 8.0}, {1.0, 3.0, 9.0, 27.0} }; float B[4] = {dataNminus3, dataNminus2, dataNminus1, dataN}; float C[4]; Matrix.Invert((float*)A, 4); Matrix.Multiply((float*)A, (float*)B, 4, 4, 1, (float*)C); return(C[0] + (C[1] * 4.0) + (C[2] * 16.0) + (C[3] * 64.0));}float polynomialExtrapolationQuartic(float dataN, float dataNminus1, float dataNminus2, float dataNminus3, float dataNminus4){ float A[5][5] = { {1.0, 0.0, 0.0, 0.0, 0.0}, {1.0, 1.0, 1.0, 1.0, 1.0}, {1.0, 2.0, 4.0, 8.0, 16.0}, {1.0, 3.0, 9.0, 27.0, 81.0}, {1.0, 4.0, 8.0, 64.0, 256.0} }; float B[5] = {dataNminus4, dataNminus3, dataNminus2, dataNminus1, dataN}; float C[5]; Matrix.Invert((float*)A, 5); Matrix.Multiply((float*)A, (float*)B, 5, 5, 1, (float*)C); return(C[0] + (C[1] * 5.0) + (C[2] * 25.0) + (C[3] * 125.0) + (C[4] * 625.0));}float polynomialExtrapolationQuintic(float dataN, float dataNminus1, float dataNminus2, float dataNminus3, float dataNminus4, float dataNminus5){ float A[6][6] = { {1.0, 0.0, 0.0, 0.0, 0.0, 0.0}, {1.0, 1.0, 1.0, 1.0, 1.0, 1.0}, {1.0, 2.0, 4.0, 8.0, 16.0, 32.0}, {1.0, 3.0, 9.0, 27.0, 81.0, 243.0}, {1.0, 4.0, 8.0, 64.0, 256.0, 1024.0}, {1.0, 5.0, 25.0, 125.0, 625.0, 3125.0} }; float B[6] = {dataNminus5, dataNminus4, dataNminus3, dataNminus2, dataNminus1, dataN}; float C[6]; Matrix.Invert((float*)A, 6); Matrix.Multiply((float*)A, (float*)B, 6, 6, 1, (float*)C); return(C[0] + (C[1] * 6.0) + (C[2] * 36.0) + (C[3] * 216.0) + (C[4] * 1296.0) + (C[5] * 7776.0));} |
hasil Serial monitor: