Mesin antrian adalah sistem informasi antara meja layanan dan pengunjung untuk mengatur waktu pelayanan terhadap pengunjung sesuai urutan kedatangan. Sistem ini terdiri atas media, dan tombol panggil, bisa juga ditambahkan dengan tombol tiket (dengan cetak tiket). Media informasi seperti seven segment, running text (dmd), monitor, suara yang diletakkan di ruang tunggu yang terlihat/terdengar di kursi pengunjung yang sedang antri.
Mesin antrian dalam proyek ini memiliki fitur berikut :
- Tombol panggil 4 buah dengan fitur cascade yaitu masing-masing tombol dapat ditekan bersamaan tanpa harus menunggu proses panggilan meja operator lain.
- Tombol tiket 1 buah dan dilengkapi cetak tiket
- Tombol reset untuk mengembalikan ke keadaan awal
- Media dot matik P10 sebagai papan informasi.
- Suara panggil mp3 berupa nomor antrian dan nomor loket
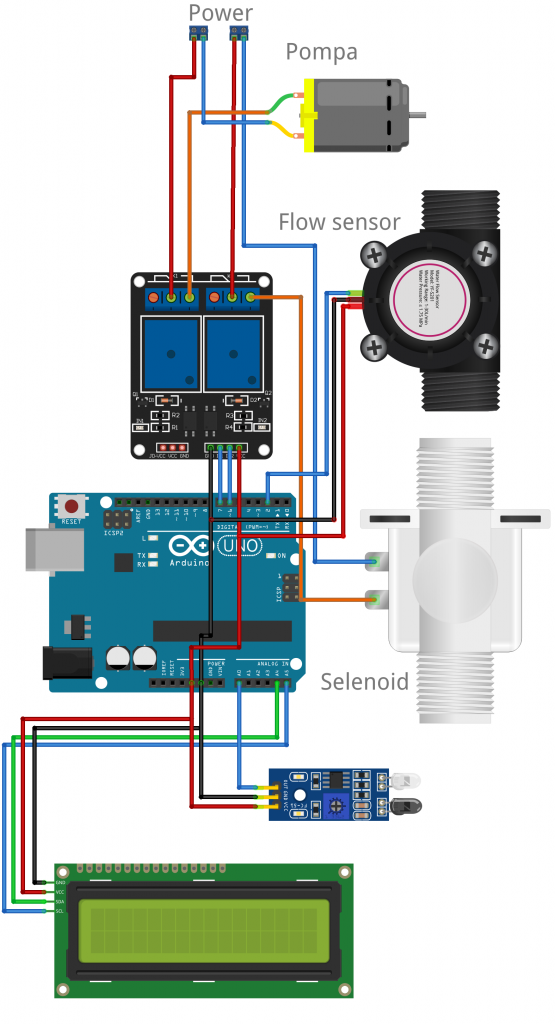
Skema Mesin antrian arduino :
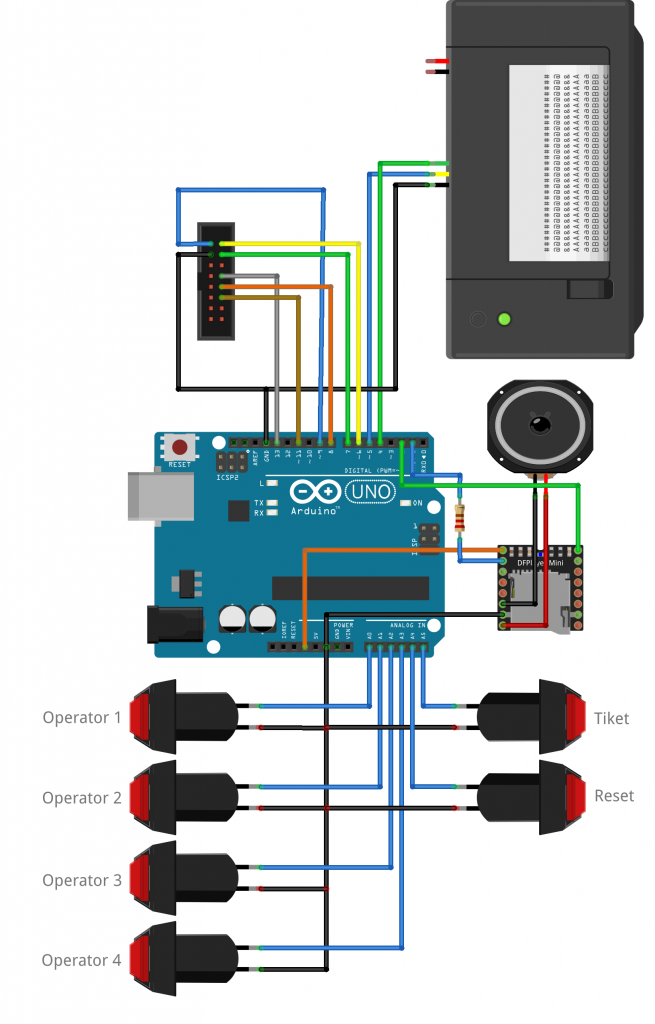
Komponen yang digunakan dalam membuat mesin antrian menggunakan dmd (dot matrix display) berbasis arduino :
- Arduino uno
- DMD P10
- Printer thermal
- DF Player mini mp3, speaker, resistor
- Tombol
Sketch / koding sistem antrian arduino :
#define pinTombolPanggil1 A0
#define pinTombolPanggil2 A1
#define pinTombolPanggil3 A2
#define pinTombolPanggil4 A3
#define pinTombolReset A4
#define pinTombolTiket A5
#define pinMP3Busy 2
#define belas 12 //belas.mp3
#define puluh 13 //puluh.mp3
#define seratus 14 //seratus.mp3
#define ratus 15 //ratus.mp3
#define seribu 16 //seribu.mp3
#define ribu 17 //ribu.mp3
#define koma 18 //Koma.mp3
#define antrianNomor 101
#define silahkanKeCS 102
#include <SPI.h>
#include <DMD_Semesin.h>
#include <fonts/angka6x14ABCD.h>
#include <DFPlayer_Mini_Mp3.h>
#include "Adafruit_Thermal.h"
byte nomorAntrianDaftar;
byte nomorAntrianPanggil;
byte nomorCSPanggil;
SPIDMD dmd(1, 1);
SoftwareSerial serialPrinter(4, 5);
Adafruit_Thermal printer(&serialPrinter);
struct DataAntrian
{
uint16_t counterTiket;
uint16_t counterPanggil;
uint8_t CS;
bool dataTombolTekan[4];
};
DataAntrian dataAntrian;
byte pinTombolPanggil[] = {pinTombolPanggil1, pinTombolPanggil2, pinTombolPanggil3, pinTombolPanggil4};
char buffer[20];
bool statusTombolTiket;
byte statusTombolPanggil[4];
void setup() {
pinMode(pinTombolPanggil1, INPUT_PULLUP);
pinMode(pinTombolPanggil2, INPUT_PULLUP);
pinMode(pinTombolPanggil3, INPUT_PULLUP);
pinMode(pinTombolPanggil4, INPUT_PULLUP);
pinMode(pinTombolReset, INPUT_PULLUP);
pinMode(pinTombolTiket, INPUT_PULLUP);
Serial.begin(9600);
Serial.println(F("Mesin antrian arduino"));
Serial.println(F("https://www.project.semesin.com"));
mp3_set_serial (Serial);
mp3_set_volume(30);
Serial.println();
serialPrinter.begin(9600);
printer.begin();
printer.sleep();
dmd.clearScreen();
dmd.setBrightness(255);
dmd.selectFont(angka6x14ABCD);
dmd.begin();
}
void loop() {
bacaTombol();
if (!digitalRead(pinTombolReset))
{
delay(100);
if (!digitalRead(pinTombolReset))
{
dataAntrian.counterTiket = 0;
dataAntrian.counterPanggil = 0;
dataAntrian.CS = 0;
dataAntrian.dataTombolTekan[0] = 0;
dataAntrian.dataTombolTekan[1] = 0;
dataAntrian.dataTombolTekan[2] = 0;
dataAntrian.dataTombolTekan[3] = 0;
dmd.clearScreen();
Serial.println("Reset");
while (!digitalRead(pinTombolReset));
}
}
for (byte i = 0; i < sizeof(pinTombolPanggil); i++)
{
if (dataAntrian.counterTiket > dataAntrian.counterPanggil)
{
if (dataAntrian.dataTombolTekan[i])
{
dataAntrian.counterPanggil++;
dataAntrian.CS = i + 1;
sprintf(buffer, "%02d>%1d", dataAntrian.counterPanggil, dataAntrian.CS);
dmd.drawString(2, 1, buffer);
Serial.print("call=");
Serial.println(dataAntrian.counterPanggil);
Serial.print("cs=");
Serial.println(dataAntrian.CS);
mp3_play_and_wait(antrianNomor);
suaraBilangan(dataAntrian.counterPanggil);
mp3_play_and_wait(silahkanKeCS);
suaraBilangan(dataAntrian.CS);
Serial.println();
dataAntrian.dataTombolTekan[i] = false;
}
}
}
}
void suaraBilangan(uint32_t Bilangan)
{
if (Bilangan < 100)
{
suaraPuluhan(Bilangan);
}
else if (Bilangan < 1000)
{
suaraRatusan(Bilangan);
}
else
{
suaraRibuan(Bilangan);
}
}
void suaraPuluhan(uint8_t Bilangan)
{
if (Bilangan < 12)
{
mp3_play_and_wait(Bilangan);
}
else if (Bilangan < 20)
{
mp3_play_and_wait(Bilangan - 10);
mp3_play_and_wait(belas);
}
else
{
uint8_t puluhan = Bilangan / 10;
mp3_play_and_wait(puluhan);
mp3_play_and_wait(puluh);
puluhan *= 10;
if (Bilangan - puluhan != 0)
{
mp3_play_and_wait((Bilangan - puluhan));
}
}
}
void suaraRatusan(uint16_t Bilangan)
{
uint8_t ratusan = (uint8_t)(Bilangan / 100);
if (ratusan == 1)
{
mp3_play_and_wait(seratus);
}
else
{
mp3_play_and_wait(ratusan);
mp3_play_and_wait(ratus);
}
if (Bilangan % 100)
{
suaraPuluhan(Bilangan - (ratusan * 100));
}
}
void suaraRibuan(uint32_t Bilangan)
{
uint16_t ribuan = (uint16_t)(Bilangan / 1000);
if (ribuan == 1)
{
mp3_play_and_wait(seribu);
}
else if (ribuan < 100)
{
suaraPuluhan(ribuan);
mp3_play_and_wait(ribu);
}
else
{
suaraRatusan(ribuan);
mp3_play_and_wait(ribu);
}
if (Bilangan % 1000)
{
suaraRatusan(Bilangan - (ribuan * 1000));
}
}
void mp3_play_and_wait(uint16_t num) {
mp3_play (num);
delay(200);
while (!digitalRead(pinMP3Busy))
{
bacaTombol();
}
}
void bacaTombol()
{
if (!digitalRead(pinTombolTiket))
{
if (!statusTombolTiket)
{
delay(100);
if (!digitalRead(pinTombolTiket))
{
dataAntrian.counterTiket++;
printer.wake();
printer.setDefault();
printer.justify('C');
printer.println("Nomor Antrian");
printer.doubleHeightOn();
printer.println(dataAntrian.counterTiket);
printer.doubleHeightOff();
printer.println("Terima kasih");
printer.feed(2);
printer.sleep();
Serial.print("ambil tiket : ");
Serial.println(dataAntrian.counterTiket);
statusTombolTiket = true;
}
}
}
else
{
statusTombolTiket = false;
}
for (byte i = 0; i < sizeof(pinTombolPanggil); i++)
{
if (!digitalRead(pinTombolPanggil[i]))
{
if (!statusTombolPanggil[i])
{
delay(100);
if (!digitalRead(pinTombolPanggil[i]))
{
dataAntrian.dataTombolTekan[i] = true;
statusTombolPanggil[i] = true;
Serial.print("TombolPanggil:");
Serial.println(i);
}
}
}
else
{
statusTombolPanggil[i] = false;
}
}
}
library :
suara mp3