#define namaSekolah "Nama Sekolah"
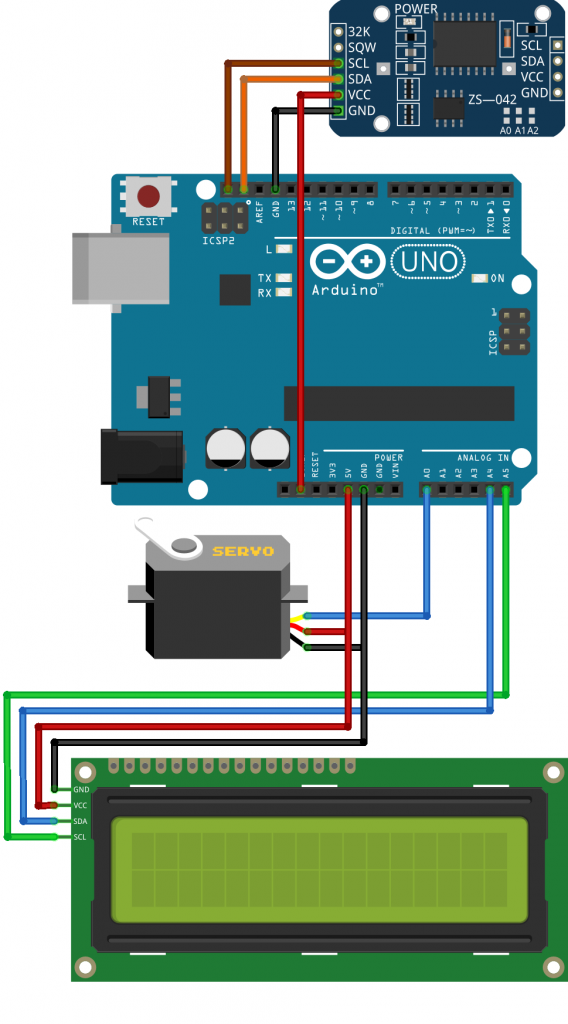
#define SQWPin A3
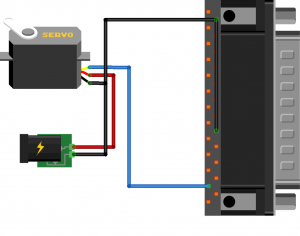
#define pinRelay 8
#define relayOn LOW
#include <avr/sleep.h>
#include <SoftwareSerial.h>
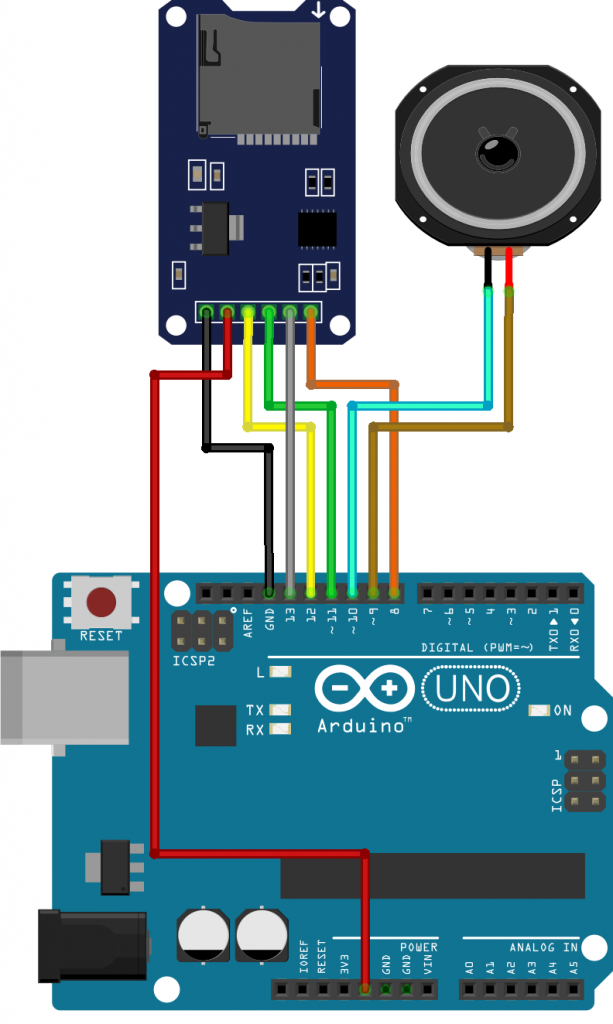
#include <DFPlayer_Mini_Mp3.h>
#include "RTC.h"
#include <EEPROM.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#define tokenEEPROM 0x83
SoftwareSerial bluetooth(2, 3);
SoftwareSerial mp3Serial(4, 5);
LiquidCrystal_I2C lcd(0x3F, 16, 2);
struct Waktu
{
byte jam;
byte menit;
};
struct TabelMataPelajaran
{
byte aktif;
Waktu waktu;
byte hariAktif;
byte mingguAktif;
byte kegiatan;
};
const char kegiatanText[][17] PROGMEM = {
"- ",
"Jam Pelajaran 1 ",
"Jam Pelajaran 2 ",
"Jam Pelajaran 3 ",
"Jam Pelajaran 4 ",
"Jam Pelajaran 5 ",
"Jam Pelajaran 6 ",
"Jam Pelajaran 7 ",
"Jam Pelajaran 8 ",
"Jam Pelajaran 9 ",
"Jam Pelajaran 10",
"Jam Pelajaran 11",
"Jam Pelajaran 12",
"Jam Pelajaran 13",
"Jam Pelajaran 14",
"Jam Pelajaran 15",
"Masuk ",
"Upacara ",
"Istirahat ",
"Istirahat1 ",
"Istirahat2 ",
"Istirahat3 ",
"Selesai istiraht",
"Kepramukaan ",
"Khusus ",
"Pulang ",
"Pulang Jum'at ",
"Pulang Sabtu ",
"Musik 1 ",
"Musik 2 ",
"Musik 3 ",
"Musik 4 ",
"Musik 5 ",
"Musik 6 ",
"Hadits 1 ",
"Hadits 2 ",
"Hadits 3 ",
"Hadits 4 ",
"Hadits 5 ",
"Hadits 6 ",
};
enum _kegiatan
{
TidakAda,
JamPelajaran1,
JamPelajaran2,
JamPelajaran3,
JamPelajaran4,
JamPelajaran5,
JamPelajaran6,
JamPelajaran7,
JamPelajaran8,
JamPelajaran9,
JamPelajaran10,
JamPelajaran11,
JamPelajaran12,
JamPelajaran13,
JamPelajaran14,
JamPelajaran15,
Masuk,
Upacara,
Istirahat,
Istirahat1,
Istirahat2,
Istirahat3,
SelesaiIstirahat,
Kepramukaan,
Khusus,
Pulang,
PulangJumat,
PulangSabtu,
Musik1,
Musik2,
Musik3,
Musik4,
Musik5,
Musik6,
Hadits1,
Hadits2,
Hadits3,
Hadits4,
Hadits5,
Hadits6,
};
enum PengaturanAndroid
{
cekAses,
pengaturanJadwal,
pengaturanWaktu,
};
char karakterMusik[8] = {
0b00000,
0b00100,
0b00110,
0b00101,
0b00101,
0b00100,
0b11100,
0b11100
};
byte karakterDetik1[8] = {
0b00000,
0b00000,
0b00000,
0b00100,
0b00000,
0b00000,
0b00000,
0b00000
};
byte karakterDetik2[8] = {
0b00000,
0b00000,
0b00100,
0b01010,
0b00100,
0b00000,
0b00000,
0b00000
};
byte karakterDetik3[8] = {
0b00000,
0b00100,
0b01010,
0b10001,
0b01010,
0b00100,
0b00000,
0b00000
};
byte karakterSetting[8] = {
0b00100,
0b00100,
0b00100,
0b01110,
0b00100,
0b10001,
0b01010,
0b00100
};
volatile bool interupsiDetik;
byte indexMataPelajaran;
RTC_DS3231 rtc;
DateTime now;
bool rtcValid;
byte indexPengaturanJadwal = 0;
#define hariAktifSenin 1<<6
#define hariAktifSelasa 1<<5
#define hariAktifRabu 1<<4
#define hariAktifKamis 1<<3
#define hariAktifJumat 1<<2
#define hariAktifSabtu 1<<1
#define hariAktifMinggu 1<<7
char namaHari[][7] = {"Minggu", "Senin", "Selasa", "Rabu", "Kamis", "Jum'at", "Sabtu"};
#define _hariAktif(Sen,Sel,Rab,Kam,Jum,Sab,Mgu) (Mgu<<7)|(Sen<<6)|(Sel<<5)|(Rab<<4)|(Kam<<3)|(Jum<<2)|(Sab<<1)
#define _mingguAktif(Mgu1,Mgu2,Mgu3,Mgu4,Mgu5,Mgu6) (Mgu1<<7)|(Mgu2<<6)|(Mgu3<<5)|(Mgu4<<4)|(Mgu5<<3)|(Mgu6<<2)
#define _waktu(Jam, Menit) {Jam, Menit}
#define Aktif 1
#define TidakAktif 0
TabelMataPelajaran jadwalBelajar[40];
Waktu waktu;
char bufWaktu[40];
byte detikSebelumnya = 60;
byte tanggalSebelumnya = 0;
Waktu jadwalBerikutnya;
byte menitBel;
bool statusBel;
bool statusPengingat;
byte jadwalBerikutnyaKegiatan;
void setup() {
digitalWrite(pinRelay, !relayOn);
pinMode(pinRelay, OUTPUT);
pinMode(SQWPin, INPUT_PULLUP);
Serial.begin(9600);
Serial.println(F("Bel Sekolah Dengan Kontrol Android"));
Serial.println();
Wire.begin();
Wire.beginTransmission(0x3F);
if (Wire.endTransmission())
{
lcd = LiquidCrystal_I2C(0x27, 16, 2);
}
lcd.begin();
lcd.command (0x40 | (0 << 3));
for (byte i = 0; i < 8; i++)
lcd.write (karakterDetik1[i]);
lcd.command (0x40 | (1 << 3));
for (byte i = 0; i < 8; i++)
lcd.write (karakterDetik2[i]);
lcd.command (0x40 | (2 << 3));
for (byte i = 0; i < 8; i++)
lcd.write (karakterDetik3[i]);
lcd.command (0x40 | (3 << 3));
for (byte i = 0; i < 8; i++)
lcd.write (karakterDetik2[i]);
lcd.command (0x40 | (4 << 3));
for (byte i = 0; i < 8; i++)
lcd.write (karakterMusik[i]);
lcd.command (0x40 | (5 << 3));
for (byte i = 0; i < 8; i++)
lcd.write (karakterSetting[i]);
lcd.backlight();
lcd.setCursor(0, 0);
lcd.print("Bel Sekolah");
lcd.setCursor(0, 1);
lcd.print(namaSekolah);
mp3Serial.begin(9600);
bluetooth.begin (9600);
bluetooth.listen();
mp3_set_serial (mp3Serial);
mp3_set_volume (15);
rtc.begin();
if (rtc.lostPower())
{
Serial.println(F("RTC lost power, lets set the time!"));
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
}
rtc.writeSqwPinMode(DS3231_SquareWave1Hz);
if (EEPROM.read(sizeof(jadwalBelajar)) != tokenEEPROM)
{
nilaiAwal();
EEPROM.write(sizeof(jadwalBelajar), tokenEEPROM);
Serial.println("setting awal");
}
EEPROM.get(0, jadwalBelajar);
cekJadwalHariIni();
delay(1000);
lcd.clear();
Serial.println(F("Sistem bel sekolah dimulai"));
}
void loop() {
if (digitalRead(SQWPin))
{
if (rtcValid)
{
rtcValid = false;
now = rtc.now();
uint16_t unixJadwalBerikutnya = (jadwalBerikutnya.jam * 60) + jadwalBerikutnya.menit;
uint16_t unixWaktu = (now.jam * 60) + now.menit;
if (!now.detik)
{
if (jadwalBerikutnyaKegiatan && (jadwalBerikutnya.jam == now.jam) && (jadwalBerikutnya.menit == now.menit))
{
lcd.setCursor(6, 1);
lcd.print((char)4);
lcd.setCursor(0, 0);
lcd.print((__FlashStringHelper *)kegiatanText[jadwalBerikutnyaKegiatan]);
mp3_play (jadwalBerikutnyaKegiatan);
Serial.println((__FlashStringHelper *)kegiatanText[jadwalBerikutnyaKegiatan]);
menitBel = jadwalBerikutnya.menit;
statusBel = true;
statusPengingat = false;
}
else if (jadwalBerikutnyaKegiatan && (unixWaktu == unixJadwalBerikutnya - 1))
{
statusPengingat = true;
digitalWrite(pinRelay, relayOn);
Serial.println("Pengingat bel masuk 1 menit lagi");
}
}
if (menitBel != now.menit)
{
if (statusBel)
{
lcd.setCursor(6, 1);
lcd.print(' ');
digitalWrite(pinRelay, !relayOn);
cariJadwal();
statusBel = false;
tanggalSebelumnya = 0;
}
}
if (statusPengingat)
{
lcd.setCursor(1, 1);
if (now.detik % 2)
{
sprintf(bufWaktu, "%02d:%02d", jadwalBerikutnya.jam, jadwalBerikutnya.menit);
lcd.print(bufWaktu);
}
else
{
lcd.print(" ");
}
}
if (detikSebelumnya != now.detik)
{
sprintf(bufWaktu, "%02d:%02d:%02d", now.jam, now.menit, now.detik);
lcd.setCursor(8, 1);
lcd.print(bufWaktu);
lcd.setCursor(0, 1);
lcd.print((char)(now.detik % 4));
sprintf(bufWaktu, "%02d:%02d:%02d %s, %02d/%02d/%02d", now.jam, now.menit, now.detik, namaHari[now.hari - 1], now.tanggal, now.bulan, now.tahun - 2000);
Serial.println(bufWaktu);
}
if (tanggalSebelumnya != now.tanggal)
{
tanggalSebelumnya = now.tanggal;
lcd.clear();
lcd.print(namaHari[now.hari - 1]);
lcd.print(',');
sprintf(bufWaktu, "%02d/%02d/%02d", now.tanggal, now.bulan, now.tahun - 2000);
lcd.setCursor(8, 0);
lcd.print(bufWaktu);
cariJadwal();
}
}
}
else
{
rtcValid = true;
}
cekBluetooth();
}
void cekBluetooth()
{
uint8_t tokenMulai;
uint8_t perintah;
uint8_t parameter;
uint8_t panjang1;
uint8_t panjang2;
char c;
uint8_t i, j;
uint8_t tokenSelesai;
byte bufferSerial[100];
byte *alamat;
if (bluetooth.available())
{
tokenMulai = bluetoothRead();
if (tokenMulai == 0xFD)
{
panjang1 = bluetoothRead();
panjang2 = bluetoothRead();
if (panjang2 == 254 - panjang1)
{
if (panjang1 >= sizeof(bufferSerial))
{
panjang1 = sizeof(bufferSerial);
}
uint16_t timeOut = 0xFFF;
i = 0;
do
{
if (bluetooth.available())
{
c = bluetoothRead();
bufferSerial[i++] = c;
}
} while ((i < panjang1 + 3) && (timeOut--));
perintah = bufferSerial[0];
parameter = bufferSerial[1];
tokenSelesai = bufferSerial[i - 1];
if (tokenSelesai == 0x00)
{
delay(10);
bluetooth.write(254);
switch (perintah)
{
case cekAses:
bluetooth.write(1);
bluetooth.write(254);
break;
case pengaturanJadwal:
lcd.setCursor(6, 1);
lcd.print((char)5);
memcpy((byte*)&jadwalBelajar[parameter], bufferSerial + 2, sizeof(TabelMataPelajaran));
if (parameter == (sizeof(jadwalBelajar) / sizeof(TabelMataPelajaran)) - 1)
{
EEPROM.put(0, jadwalBelajar);
Serial.println("Jadwal diterima");
lcd.setCursor(6, 1);
lcd.print(' ');
tanggalSebelumnya = 0;
}
break;
case pengaturanWaktu:
memcpy((byte*)&now, bufferSerial + 2, sizeof(DateTime));
rtc.adjust(now);
tanggalSebelumnya = 0;
Serial.println("Setting waktu diterima");
break;
}
}
else
{
bluetooth.write(252);
}
}
}
}
}
byte bluetoothRead()
{
uint16_t timeOut = 0xFFF;
while (!bluetooth.available() && timeOut--);
return bluetooth.read();
}
void nilaiAwal()
{
byte i = 0;
jadwalBelajar[i++] = {Aktif, _waktu( 6, 45 ), hariAktifSenin , _mingguAktif(1, 0, 0, 0, 0, 0), Upacara};
jadwalBelajar[i++] = {Aktif, _waktu( 6, 45 ), hariAktifSenin , _mingguAktif(0, 1, 1, 1, 1, 1), JamPelajaran1};
jadwalBelajar[i++] = {Aktif, _waktu( 6, 45 ), _hariAktif(0, 1, 1, 1, 1, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran1};
jadwalBelajar[i++] = {Aktif, _waktu( 7, 30 ), _hariAktif(1, 1, 1, 1, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran2};
jadwalBelajar[i++] = {Aktif, _waktu( 8, 15 ), _hariAktif(1, 1, 1, 1, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran3};
jadwalBelajar[i++] = {Aktif, _waktu( 9, 0 ), _hariAktif(1, 1, 1, 1, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran4};
jadwalBelajar[i++] = {Aktif, _waktu( 9, 45 ), _hariAktif(1, 1, 1, 1, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), Istirahat};
jadwalBelajar[i++] = {Aktif, _waktu( 10, 15 ), _hariAktif(1, 1, 1, 1, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran5};
jadwalBelajar[i++] = {Aktif, _waktu( 11, 0 ), _hariAktif(1, 1, 1, 1, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran6};
jadwalBelajar[i++] = {Aktif, _waktu( 11, 45 ), _hariAktif(1, 1, 1, 1, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), Istirahat};
jadwalBelajar[i++] = {Aktif, _waktu( 12, 30 ), _hariAktif(1, 1, 1, 1, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran7};
jadwalBelajar[i++] = {Aktif, _waktu( 13, 15 ), _hariAktif(1, 1, 1, 1, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran8};
jadwalBelajar[i++] = {Aktif, _waktu( 14, 0 ), _hariAktif(1, 1, 1, 0, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran9};
jadwalBelajar[i++] = {Aktif, _waktu( 14, 45 ), _hariAktif(1, 1, 1, 0, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran10};
jadwalBelajar[i++] = {Aktif, _waktu( 14, 0 ), hariAktifKamis, _mingguAktif(1, 1, 1, 1, 1, 1), Kepramukaan};
jadwalBelajar[i++] = {Aktif, _waktu( 14, 45 ), hariAktifKamis, _mingguAktif(1, 1, 1, 1, 1, 1), Khusus};
jadwalBelajar[i++] = {Aktif, _waktu( 15, 30 ), _hariAktif(1, 1, 1, 1, 0, 0, 0), _mingguAktif(1, 1, 1, 1, 1, 1), Pulang};
jadwalBelajar[i++] = {Aktif, _waktu( 7, 25 ), hariAktifJumat, _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran2};
jadwalBelajar[i++] = {Aktif, _waktu( 8, 5 ), hariAktifJumat, _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran3};
jadwalBelajar[i++] = {Aktif, _waktu( 8, 45 ), hariAktifJumat, _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran4};
jadwalBelajar[i++] = {Aktif, _waktu( 9, 25 ), hariAktifJumat, _mingguAktif(1, 1, 1, 1, 1, 1), Istirahat};
jadwalBelajar[i++] = {Aktif, _waktu( 9, 55 ), hariAktifJumat, _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran5};
jadwalBelajar[i++] = {Aktif, _waktu( 10, 35 ), hariAktifJumat, _mingguAktif(1, 1, 1, 1, 1, 1), JamPelajaran6};
jadwalBelajar[i++] = {Aktif, _waktu( 11, 15 ), hariAktifJumat, _mingguAktif(1, 1, 1, 1, 1, 1), PulangJumat};
EEPROM.put(0, jadwalBelajar);
}
void cekJadwalHariIni()
{
Serial.println("Jadwal hari ini");
for (byte i = 0; i < sizeof(jadwalBelajar) / sizeof(TabelMataPelajaran) ; i++)
{
Serial.print(jadwalBelajar[i].aktif);
Serial.print('\t');
Serial.print(jadwalBelajar[i].waktu.jam);
Serial.print('\t');
Serial.print(jadwalBelajar[i].waktu.menit);
Serial.print('\t');
Serial.print(jadwalBelajar[i].hariAktif, HEX);
Serial.print('\t');
Serial.print(jadwalBelajar[i].mingguAktif, HEX);
Serial.print('\t');
Serial.print(jadwalBelajar[i].kegiatan);
Serial.print('\t');
char buf[20];
memcpy_P(buf, kegiatanText[jadwalBelajar[i].kegiatan], sizeof(kegiatanText[0]));
Serial.print(buf);
Serial.println();
}
}
void cariJadwal()
{
uint16_t unixWaktu = (now.jam * 60) + now.menit;
byte hariKeDiTanggal1 = ((now.hari + 7 - (now.tanggal % 7)) % 7) + 1;
byte SeninKe = ((now.tanggal + ((hariKeDiTanggal1 + 4) % 7)) / 7);
byte mingguKe = ((now.tanggal + hariKeDiTanggal1 + 6 - 1) / 7);
Serial.print("SeninKe = ");
Serial.println(SeninKe);
Serial.print("mingguKe = ");
Serial.println(mingguKe);
uint16_t unixTerkecil = UINT16_MAX;
jadwalBerikutnyaKegiatan = 0;
Waktu waktuTerkecil;
for (byte i = 0; i < sizeof(jadwalBelajar) / sizeof(TabelMataPelajaran); i++)
{
if (
(jadwalBelajar[i].aktif) &&
(jadwalBelajar[i].hariAktif & (1 << (8 - now.hari))) &&
(jadwalBelajar[i].mingguAktif & (1 << (8 - mingguKe)))
)
{
uint16_t unixJadwal = (jadwalBelajar[i].waktu.jam * 60) + jadwalBelajar[i].waktu.menit;
if (unixWaktu < unixJadwal)
{
if (unixTerkecil > unixJadwal)
{
unixTerkecil = unixJadwal;
jadwalBerikutnya.jam = jadwalBelajar[i].waktu.jam;
jadwalBerikutnya.menit = jadwalBelajar[i].waktu.menit;
jadwalBerikutnyaKegiatan = jadwalBelajar[i].kegiatan;
}
}
}
}
if (jadwalBerikutnyaKegiatan)
{
Serial.print("Bel berikutnya : ");
Serial.print((__FlashStringHelper *)kegiatanText[jadwalBerikutnyaKegiatan]);
Serial.print(" ");
Serial.print(jadwalBerikutnya.jam);
Serial.print(":");
Serial.println(jadwalBerikutnya.menit);
lcd.setCursor(1, 1);
sprintf(bufWaktu, "%02d:%02d", jadwalBerikutnya.jam, jadwalBerikutnya.menit);
lcd.print(bufWaktu);
}
else
{
lcd.setCursor(1, 1);
lcd.print("--:--");
}
}