Sistem keamanan merupakan bagian sistem yang bertugas memberikan akses terhadap bagian-bagian yang dilindunginya. Jika unit yang dilindungi memiliki fungsi sangat vital yang hanya di boleh diakses oleh orang tertentu maka sistem keamanannya dibuat berlapis.
Infrastruktur sistem keamanan sudah sangat berkembang, beberapa yang sering digunakan pada aplikasi mikrokontroller diantaranya :
- Kata sandi dengan tombol/keypad/remot tv
- Kartu akses dengan RFID reader
- Sidik jari
- suara dengan voice recognition
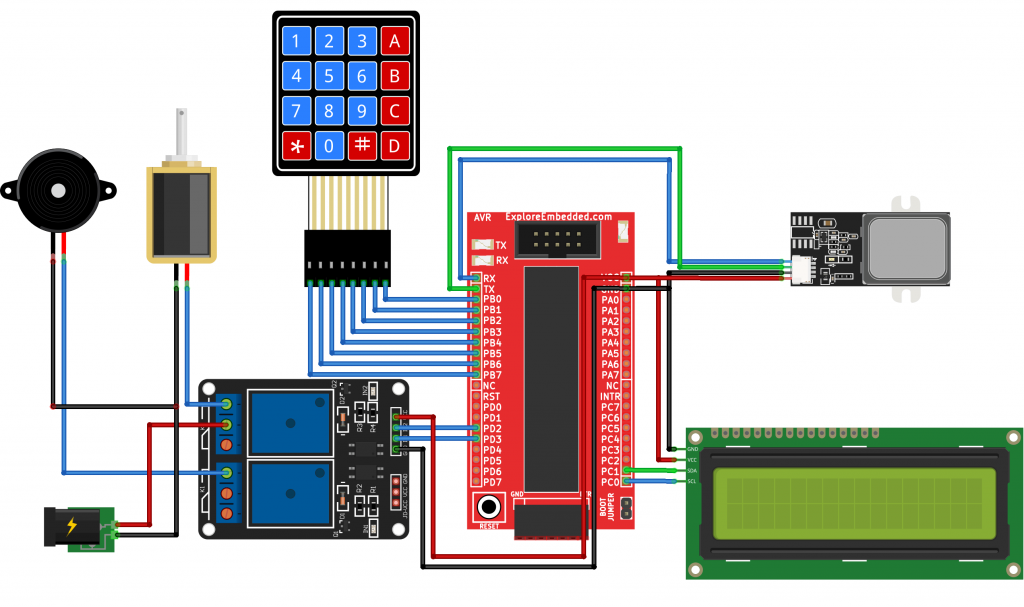
Dalam perancangan dini menggunakan 2 lapis sistem keamanan yaitu kata sandi menggunakan keypad serta sidik jari.
Komponen yang digunakan:
- ATMega8535
- Keypad membrane 4×4
- Fingerprint dy50
- LCD I2c 16×2
- Solenoid doorlock
- Buzzer
Skema perancangan sistem keamanan berlapis (password dan fingerprint):
program code vision (cvavr) sistem keamanan menggunakan finger print dan keypad:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 | #include <mega8535.h>#include <stdbool.h>#include "fingerprint.h"#include "lcdi2c.h"// Declare your global variables here#define password "1234"#define pinBuzzer PORTD.3#define pinKunci PORTD.2char buf[10];uint8_t respon;uint16_t timingFingerprintAktif;uint16_t i;char keypad;char keypadBuffer[10];bool statusPassword;uint8_t keypadCnt;#define DATA_REGISTER_EMPTY (1<<UDRE)#define RX_COMPLETE (1<<RXC)#define FRAMING_ERROR (1<<FE)#define PARITY_ERROR (1<<UPE)#define DATA_OVERRUN (1<<DOR)// USART Receiver buffer#define RX_BUFFER_SIZE 20char rx_buffer[RX_BUFFER_SIZE];#if RX_BUFFER_SIZE <= 256unsigned char rx_wr_index=0,rx_rd_index=0;#elseunsigned int rx_wr_index=0,rx_rd_index=0;#endif#if RX_BUFFER_SIZE < 256unsigned char rx_counter=0;#elseunsigned int rx_counter=0;#endif// This flag is set on USART Receiver buffer overflowbit rx_buffer_overflow;// USART Receiver interrupt service routineinterrupt [USART_RXC] void usart_rx_isr(void){char status,data;status=UCSRA;data=UDR;if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0) { rx_buffer[rx_wr_index++]=data;#if RX_BUFFER_SIZE == 256 // special case for receiver buffer size=256 if (++rx_counter == 0) rx_buffer_overflow=1;#else if (rx_wr_index == RX_BUFFER_SIZE) rx_wr_index=0; if (++rx_counter == RX_BUFFER_SIZE) { rx_counter=0; rx_buffer_overflow=1; }#endif }}#ifndef _DEBUG_TERMINAL_IO_// Get a character from the USART Receiver buffer#define _ALTERNATE_GETCHAR_#pragma used+char getchar(void){char data;while (rx_counter==0);data=rx_buffer[rx_rd_index++];#if RX_BUFFER_SIZE != 256if (rx_rd_index == RX_BUFFER_SIZE) rx_rd_index=0;#endif#asm("cli")--rx_counter;#asm("sei")return data;}#pragma used-#endifchar scanning_keypad(){ PORTB = 0b01111111; delay_ms(20); if(PINB.0 == 0){while(PINB.0 == 0);return 'A';} if(PINB.1 == 0){while(PINB.1 == 0);return 'B';} if(PINB.2 == 0){while(PINB.2 == 0);return 'C';} if(PINB.3 == 0){while(PINB.3 == 0);return 'D';} PORTB = 0b10111111; delay_ms(20); if(PINB.0 == 0){while(PINB.0 == 0);return '3';} if(PINB.1 == 0){while(PINB.1 == 0);return '6';} if(PINB.2 == 0){while(PINB.2 == 0);return '9';} if(PINB.3 == 0){while(PINB.3 == 0);return '#';} PORTB = 0b11011111; delay_ms(20); if(PINB.0 == 0){while(PINB.0 == 0);return '2';} if(PINB.1 == 0){while(PINB.1 == 0);return '5';} if(PINB.2 == 0){while(PINB.2 == 0);return '8';} if(PINB.3 == 0){while(PINB.3 == 0);return '0';} PORTB = 0b11101111; delay_ms(20); if(PINB.0 == 0){while(PINB.0 == 0);return '1';} if(PINB.1 == 0){while(PINB.1 == 0);return '4';} if(PINB.2 == 0){while(PINB.2 == 0);return '7';} if(PINB.3 == 0){while(PINB.3 == 0);return '*';} return 0; }// Standard Input/Output functions#include <stdio.h>void main(void){// Declare your local variables here// Input/Output Ports initialization// Port A initialization// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) | (0<<DDA3) | (0<<DDA2) | (0<<DDA1) | (0<<DDA0);// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) | (0<<PORTA3) | (0<<PORTA2) | (0<<PORTA1) | (0<<PORTA0);// Port B initialization// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In DDRB=(1<<DDB7) | (1<<DDB6) | (1<<DDB5) | (1<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) | (1<<PORTB3) | (1<<PORTB2) | (1<<PORTB1) | (1<<PORTB0);// Port C initialization// Function: Bit7=In Bit6=In Bit5=In Bit4=Out Bit3=In Bit2=In Bit1=In Bit0=In DDRC=(0<<DDC7) | (0<<DDC6) | (0<<DDC5) | (1<<DDC4) | (0<<DDC3) | (0<<DDC2) | (0<<DDC1) | (0<<DDC0);// State: Bit7=T Bit6=T Bit5=T Bit4=0 Bit3=T Bit2=T Bit1=T Bit0=T PORTC=(0<<PORTC7) | (0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0);// Port D initialization// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In DDRD=(0<<DDD7) | (0<<DDD6) | (0<<DDD5) | (0<<DDD4) | (1<<DDD3) | (1<<DDD2) | (0<<DDD1) | (0<<DDD0);// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) | (0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);// Timer/Counter 0 initialization// Clock source: System Clock// Clock value: Timer 0 Stopped// Mode: Normal top=0xFF// OC0 output: DisconnectedTCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01) | (0<<CS02) | (0<<CS01) | (0<<CS00);TCNT0=0x00;OCR0=0x00;// Timer/Counter 1 initialization// Clock source: System Clock// Clock value: Timer1 Stopped// Mode: Normal top=0xFFFF// OC1A output: Disconnected// OC1B output: Disconnected// Noise Canceler: Off// Input Capture on Falling Edge// Timer1 Overflow Interrupt: Off// Input Capture Interrupt: Off// Compare A Match Interrupt: Off// Compare B Match Interrupt: OffTCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (0<<WGM11) | (0<<WGM10);TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) | (0<<CS12) | (0<<CS11) | (0<<CS10);TCNT1H=0x00;TCNT1L=0x00;ICR1H=0x00;ICR1L=0x00;OCR1AH=0x00;OCR1AL=0x00;OCR1BH=0x00;OCR1BL=0x00;// Timer/Counter 2 initialization// Clock source: System Clock// Clock value: Timer2 Stopped// Mode: Normal top=0xFF// OC2 output: DisconnectedASSR=0<<AS2;TCCR2=(0<<WGM20) | (0<<COM21) | (0<<COM20) | (0<<WGM21) | (0<<CS22) | (0<<CS21) | (0<<CS20);TCNT2=0x00;OCR2=0x00;// Timer(s)/Counter(s) Interrupt(s) initializationTIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) | (0<<OCIE1A) | (0<<OCIE1B) | (0<<TOIE1) | (0<<OCIE0) | (0<<TOIE0);// External Interrupt(s) initialization// INT0: Off// INT1: Off// INT2: OffMCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (0<<ISC00);MCUCSR=(0<<ISC2);// USART initialization// Communication Parameters: 8 Data, 1 Stop, No Parity// USART Receiver: On// USART Transmitter: On// USART Mode: Asynchronous// USART Baud Rate: 57600UCSRA=(0<<RXC) | (0<<TXC) | (0<<UDRE) | (0<<FE) | (0<<DOR) | (0<<UPE) | (0<<U2X) | (0<<MPCM);UCSRB=(1<<RXCIE) | (0<<TXCIE) | (0<<UDRIE) | (1<<RXEN) | (1<<TXEN) | (0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);UCSRC=(1<<URSEL) | (0<<UMSEL) | (0<<UPM1) | (0<<UPM0) | (0<<USBS) | (1<<UCSZ1) | (1<<UCSZ0) | (0<<UCPOL);UBRRH=0x00;UBRRL=0x08;// Analog Comparator initialization// Analog Comparator: Off// The Analog Comparator's positive input is// connected to the AIN0 pin// The Analog Comparator's negative input is// connected to the AIN1 pinACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) | (0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);SFIOR=(0<<ACME);// ADC initialization// ADC disabledADCSRA=(0<<ADEN) | (0<<ADSC) | (0<<ADATE) | (0<<ADIF) | (0<<ADIE) | (0<<ADPS2) | (0<<ADPS1) | (0<<ADPS0);// SPI initialization// SPI disabledSPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) | (0<<CPOL) | (0<<CPHA) | (0<<SPR1) | (0<<SPR0);// TWI initialization// TWI disabledTWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) | (0<<TWIE);// Global enable interrupts#asm("sei")i2c_begin();lcd_begin(0x27,16,2); // alamat lcd i2clcd_clear();lcd_puts("Sistem Keamanan");lcd_gotoxy(0,1);lcd_puts("www.semesin.com");delay_ms(3000);lcd_clear();//rx_wr_index = 15;fingerPrintBegin((uint8_t*)&rx_buffer, &rx_wr_index);respon = checkPassword();//sprintf(buf, "%2X", respon);lcd_gotoxy(0,0);lcd_puts("Akses terbatas ");delay_ms(2000);keypadCnt = 0;while (1) { // Place your code here while(1) { if(!statusPassword) { keypad = scanning_keypad(); if(keypad) { if(keypad == '#') { keypadBuffer[keypadCnt] = 0; lcd_clear(); lcd_gotoxy(0,0); if(strcmp(keypadBuffer, password) == 0) { statusPassword = 1; timingFingerprintAktif = 30000; lcd_puts("Tempel sidikjari"); } else { statusPassword = 0; lcd_puts("Password salah "); for(i=0;i<3;i++) { pinBuzzer = 1; delay_ms(1000); pinBuzzer = 0; delay_ms(1000); } lcd_clear(); lcd_puts("Akses terbatas "); } keypadCnt = 0; } if((keypad >= '0') &&(keypad <= '9')) { if(keypadCnt == 0) { lcd_gotoxy(0,0); lcd_puts("Password : "); } if(keypadCnt < 4) { lcd_gotoxy(keypadCnt,1); lcd_send_data(keypad); keypadBuffer[keypadCnt] = keypad; keypadCnt++; } } } } else { delay_ms(1); timingFingerprintAktif--; if(!timingFingerprintAktif) { statusPassword = 0; pinBuzzer = 1; delay_ms(1000); pinBuzzer = 0; lcd_clear(); lcd_puts("Panel "); } lcd_gotoxy(0,1); lcd_puts("Tempelkan jari "); respon = getImage(); if(respon != FINGERPRINT_OK) { break; } lcd_gotoxy(0,1); lcd_puts("Konversi gambar "); respon = image2Tz(1); if(respon != FINGERPRINT_OK) { break; } lcd_gotoxy(0,1); lcd_puts("Mencari id "); respon = fingerFastSearch(); if(respon != FINGERPRINT_OK) { break; } lcd_clear(); sprintf(buf, "id = %2d", fingerID); lcd_gotoxy(0,1); lcd_puts(buf); lcd_gotoxy(0,0); lcd_puts("Panel"); pinKunci = 1; delay_ms(5000); pinKunci = 0; } } }} |
library: