Pengaturan waktu atau adjust rtc ds3231 bisa dilakukan dengan cara berikut :
1. Pengaturan langsung
a. Parameter jumlah detik sejak 1 Januari 1970 (UTC)
1 | rtc.adjust(DateTime(1740199920)); |
angka 1740199920 adalah nilai utc pada 22 Februari 2025 11:52:00
b. Parameter tanggal wan waktu
1 | rtc.adjust(DateTime(2025, 2, 22, 11, 52, 0)); |
parameter yang di inputkan masing-masing adalah tahun,bulan, tanggal, jam, menit dan detik.
c. Parameter string tanggal dan string waktu
1 | rtc.adjust(DateTime("Feb 22 2025", "11:52:00")); |
d. Paramter string ISO
1 | rtc.adjust(DateTime("2025-02-22T11:52:00")); |
2. Pengaturan otomatis sesuai waktu compile.
1 | rtc.adjust(DateTime(F(__DATE__), F(__TIME__))); |
__DATE__ dan __TIME__ adalah macro preprocessor yang memiliki nilai string tanggal dan waktu pada saat compile, preprocessor lainnya seperti __FILE__, __LINE__, __TIMESTAMP__
3. Pengaturan dengan entry nilai
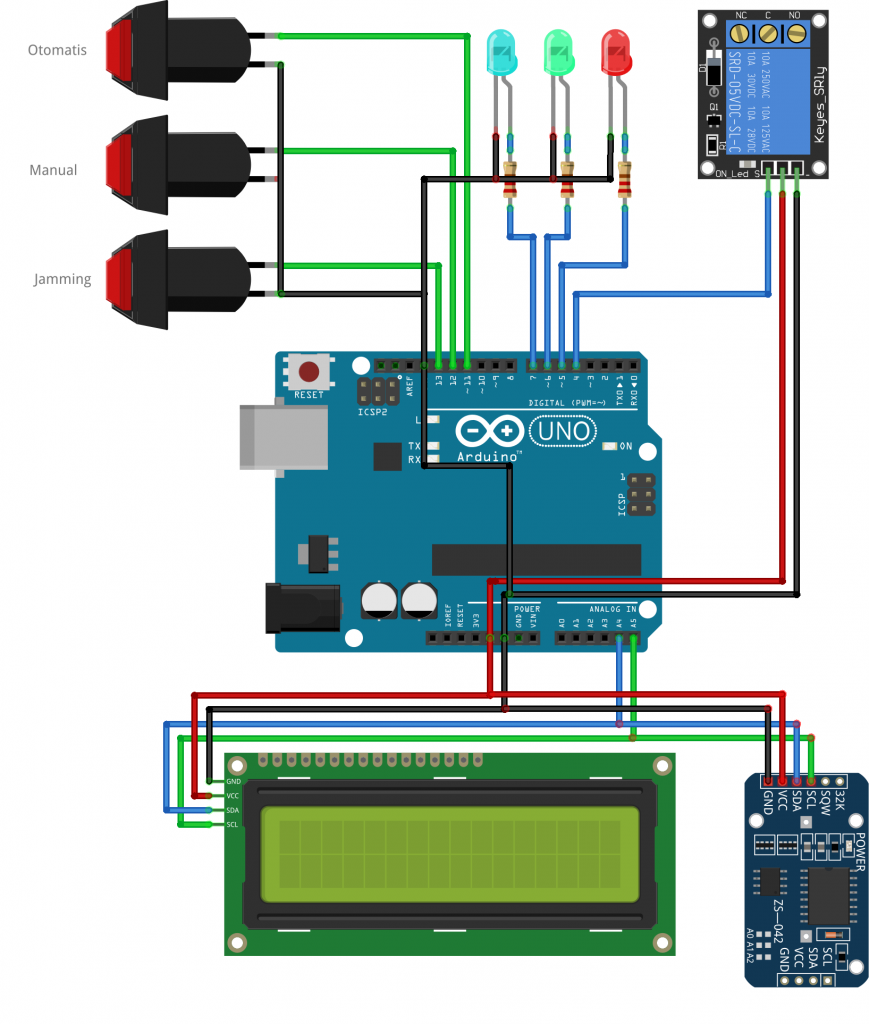
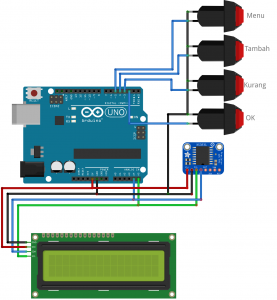
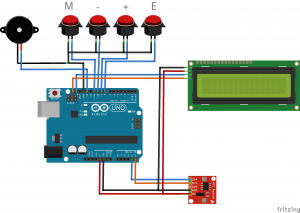
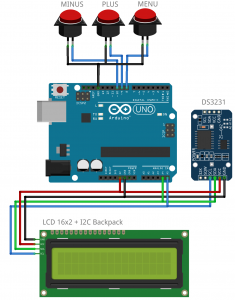
Untuk flexibilitas, pengaturan waktu rtc bisa dilakukan dengan entry melalui tombol, keypad, android, serial dll. Berikut ini adalah contoh pengaturan melalui tiga tombol:
Skema Pengaturan waktu modul rtc ds3231 meun tombol:
Koding arduino adjust rtc ds3231:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 | #define menuPin 8#define plusPin 9#define minusPin 10#include <Wire.h>;#include <LCD_I2C.h>;#include <RTClib.h>;LCD_I2C lcd(0x27, 16, 2);RTC_DS3231 rtc;DateTime now;DateTime rtcSet;enum menuMode { settingStandby, settingJam, settingMenit, settingDetik, settingTanggal, settingBulan, settingTahun, jumlahMenuMode,};char buffer[20];byte menuIndex;byte detikSebelumnya;void setup() { pinMode(menuPin, INPUT_PULLUP); pinMode(plusPin, INPUT_PULLUP); pinMode(minusPin, INPUT_PULLUP); Serial.begin(9600); Serial.println(F("Mengatur waktu rtc ds3231 dengan library RTCLib")); Serial.println(); Wire.begin(); Wire.beginTransmission(0x27); if (Wire.endTransmission()) { lcd = LCD_I2C(0x3F, 16, 2); } lcd.begin(); // if (rtc.lostPower()) // { // 1a // rtc.adjust(DateTime(1740199920)); // // 1b // rtc.adjust(DateTime(2025, 2, 22, 11, 52, 0)); // // 1c // rtc.adjust(DateTime("Feb 22 2025", "11:52:00")); // // 1d // rtc.adjust(DateTime("2025-02-22T11:52:00")); // // 2 // rtc.adjust(DateTime(F(__DATE__), F(__TIME__))); //} lcd.backlight(); lcd.print("Adjust RTC"); lcd.setCursor(0, 1); lcd.print("semesin.com"); delay(3000); lcd.clear();}void loop() { now = rtc.now(); if (detikSebelumnya != now.second()) { detikSebelumnya = now.second(); if (menuIndex == settingStandby) { tampilanWaktu(now); } } if (!digitalRead(menuPin)) { delay(50); if (!digitalRead(menuPin)) { if (menuIndex == settingStandby) { rtcSet = DateTime(now); } menuIndex++; menuIndex %= jumlahMenuMode; if (menuIndex == settingStandby) { rtc.adjust(DateTime(rtcSet)); } tampilanMenu(); while (!digitalRead(menuPin)); } } if (!digitalRead(plusPin)) { delay(50); if (!digitalRead(plusPin)) { plusNilai(); tampilanMenu(); while (!digitalRead(plusPin)); } } if (!digitalRead(minusPin)) { delay(50); if (!digitalRead(minusPin)) { minusNilai(); tampilanMenu(); while (!digitalRead(minusPin)); } }}void tampilanMenu() { tampilanWaktu(rtcSet); switch (menuIndex) { case settingStandby: lcd.noBlink(); break; case settingJam: lcd.setCursor(4, 1); lcd.blink(); break; case settingMenit: lcd.setCursor(7, 1); break; case settingDetik: lcd.setCursor(10, 1); break; case settingTanggal: lcd.setCursor(3, 0); break; case settingBulan: lcd.setCursor(6, 0); break; case settingTahun: lcd.setCursor(9, 0); break; }}void tampilanWaktu(DateTime datetime) { sprintf(buffer, "%02d/%02d/%04d", datetime.day(), datetime.month(), datetime.year()); lcd.setCursor(3, 0); lcd.print(buffer); sprintf(buffer, "%02d:%02d:%02d", datetime.hour(), datetime.minute(), datetime.second()); lcd.setCursor(4, 1); lcd.print(buffer);}void plusNilai() { switch (menuIndex) { case settingStandby: break; case settingJam: rtcSet = rtcSet + TimeSpan(0, 1, 0, 0); break; case settingMenit: rtcSet = rtcSet + TimeSpan(0, 0, 1, 0); break; case settingDetik: rtcSet = rtcSet + TimeSpan(0, 0, 0, 1); break; case settingTanggal: rtcSet = rtcSet + TimeSpan(1, 0, 0, 0); break; case settingBulan: rtcSet = DateTime(rtcSet.year(), rtcSet.month() == 12 ? 1 : rtcSet.month() + 1, rtcSet.day(), rtcSet.hour(), rtcSet.minute(), rtcSet.second()); break; case settingTahun: rtcSet = DateTime(rtcSet.year() + 1, rtcSet.month(), rtcSet.day(), rtcSet.hour(), rtcSet.minute(), rtcSet.second()); break; }}void minusNilai() { switch (menuIndex) { case settingStandby: break; case settingJam: rtcSet = rtcSet - TimeSpan(0, 1, 0, 0); break; case settingMenit: rtcSet = rtcSet - TimeSpan(0, 0, 1, 0); break; case settingDetik: rtcSet = rtcSet - TimeSpan(0, 0, 0, 1); break; case settingTanggal: rtcSet = rtcSet - TimeSpan(1, 0, 0, 0); break; case settingBulan: rtcSet = DateTime(rtcSet.year(), rtcSet.month() == 1 ? 12 : rtcSet.month() - 1, rtcSet.day(), rtcSet.hour(), rtcSet.minute(), rtcSet.second()); break; case settingTahun: rtcSet = DateTime(rtcSet.year() - 1, rtcSet.month(), rtcSet.day(), rtcSet.hour(), rtcSet.minute(), rtcSet.second()); break; }} |
Library: